|
Tutorial 11: Spaces Spaces
are useful for optimizing collision detection in application-specific
ways. They allow you to setup a customized
space-partitioning scheme by encapsulating groups of Shapes. Here are a few important concepts to keep
in mind:
Spaces
are mainly useful when you have lots of Shapes that are naturally grouped
together. For a simple example, say
your application contains ten simulated robots, each using ten Solids (each
Solid using a single Shape). You have
two options: leave all the Solids in the Simulator’s root Space, or create a
new Space for each robot. In the first
case there would be 100 * 100 collision checks every time step because every
Shape needs to be checked against every other Shape. In the second case, as long as the robots
weren’t near each other, there would only be 10 * 10 collision checks per
time step because every Space would be checked against the other Spaces. Obviously, this can save a lot of time. The
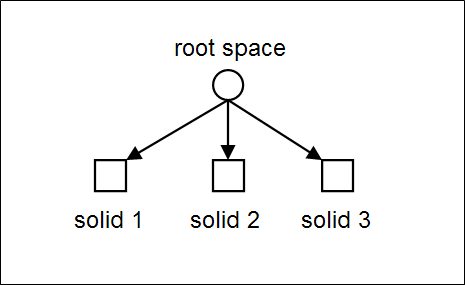
following examples show a few different ways to setup Spaces. Each example contains sample code and a
diagram showing the Space hierarchy.
Note that Solids are shown in the diagrams, but it is the Shapes that
are actually contained within the Spaces. Example 1
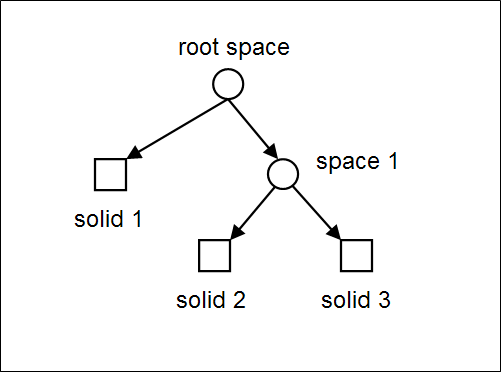
Example 2
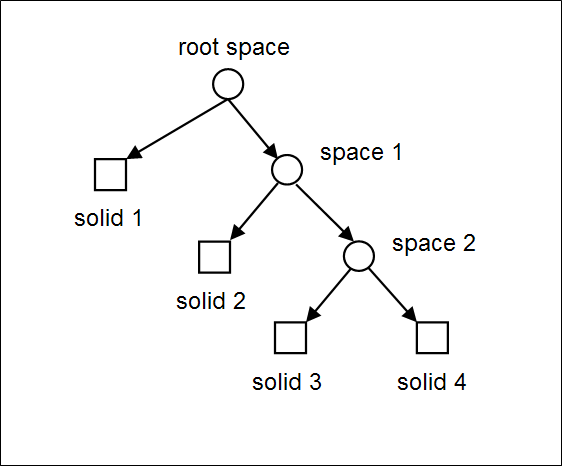
Example 3
|
OPAL is Copyright © 2004-2005 Alan Fischer, Andres Reinot, and
Tyler Streeter